Logging Main / Bike Control
Sooner or later I probably would have been at this Level of Motorcycle Electronics (Control) / Data-Acquisition anyway, because it's simple the future of riding Motorcyles "fast and safe".
But I maybe a bit sooner at this Spot, because a couple of Times a year I got a Visitation here from a man, who was responsible at the Honda Castrol Team for the WSBK Race Bikes RC45 and RC51 , with Riders like Slight, Koszinsky, Fogarty and Edwards. This guy also had Influence at Honda regarding electronically Conception of the CBR1000RR
and the Chassis-Layout of this Bike. A incredible knowledgeable guy, who meanwhile is too expensive for Motorcycle Industry, so he's now into Racing-Cars.
But it was funny every time he showed up here, he was able to tell Chassis/Traction or Suspension Problems of every Corner of every Racetrack worldwide.
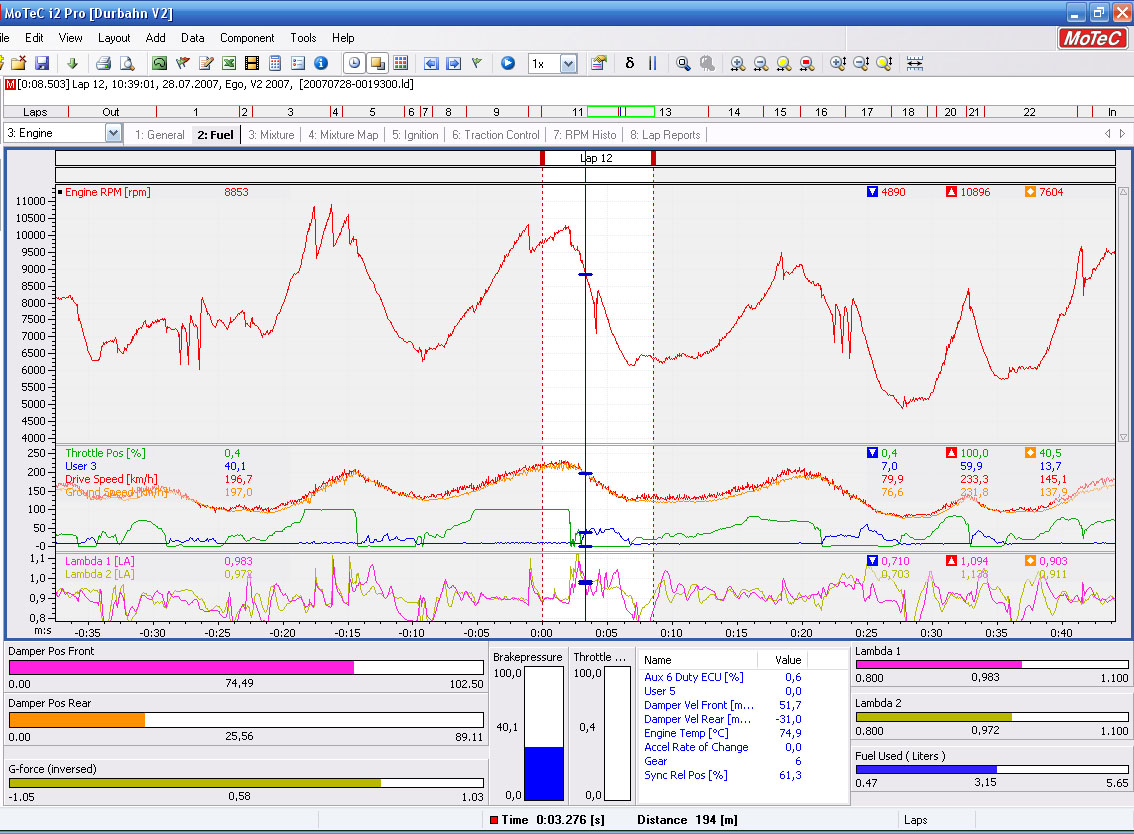
It was all about Data, and monitoring the actual states of the Bike, to be able improve the behavior of the bike, to improve the Laptimes ...... to win the WSBK.
2 years ago I was mainly into lightweight, but meanwhile I've got a couple of braincells left to take care for new things, because building lighweight Bikes does not occupy too many of them anymore.
And already familiar with Logging of Lambda-Values and adjustments of the Fuel-Tables I knew that monitoring of different States of the Bike can be a powerful tool to get more Insight into the whole Bike, and to use those won values from Sensors to make riding more Safe and Easy.

The Logging comes first, next then is to check the Accuracy of sensors over a period of Time, and their sensivity against Temperatures or Shock or Dust.... etc..
If a Sensor then is proven and works reliable you get:
Just a raw sketch of some of my thoughts:
Why a Bike at high lean angle should still have the opportunity to Set free the full horsepower ?
How to manage to warn the Driver that the Tyres are too cold ?
Why not let the Torque of the Engine let be controlled by Tyre-Temps and lean angle ?
Why not build a something, which is lifting the RPM's automatically ( for a short moment) at downshifting ?
Why not using this System/control then also to avoid a slipping rear wheel ?
Why not using GPS Signal to go for individual Corner TC-Settings ?
A Sink in the ground at Acceleration out of the Corner is a bad thing, but the Fork is indicating a Sink a few ms before the rear wheel is there, so can I use the Fork-Travel Sensor to limit the rear wheel torque for a short Moment....where the Sink is ?
Have to be Settings for TC the same for Pro's and Privateers ?
Shouldn't TC Settings be very flexible regarding Bike, Rider and riding-Style ?
How to warn rider if a Sensor fails ?
Is there a chance to program a "deceleration parachute" in case a important TC Sensor Signal is
missing ?
Just some Thoughts